About Me
A PhD with a passion for legged robots, focusing on how to use optimal control and RL-based control to make legged robots more agile, such as jumping, parkour, plummeting, and adapting to uneven terrains. Download my Simple CV .
Interests
- Optimal Control
- Legged Robot
- Reinforcement Learning
Education
-
PhD in Mechanical and Automation Engineering (MAE), 2020-2023
CUHK
-
MEng in Electronic Engineering and Information, 2015-2017
University of Chinese Academy of Sciences (UCAS)
-
MEng in Electronic Engineering and Information, 2014-2015
University of Science and Technology of China (USTC)
-
BSc in Electronic Science and Technology, 2010-2014
Wuhan University
Featured Publications
Recent Publications
Research
*
A research topic focus on using optimization approaches to give quadruped robot two point feet walking ability.
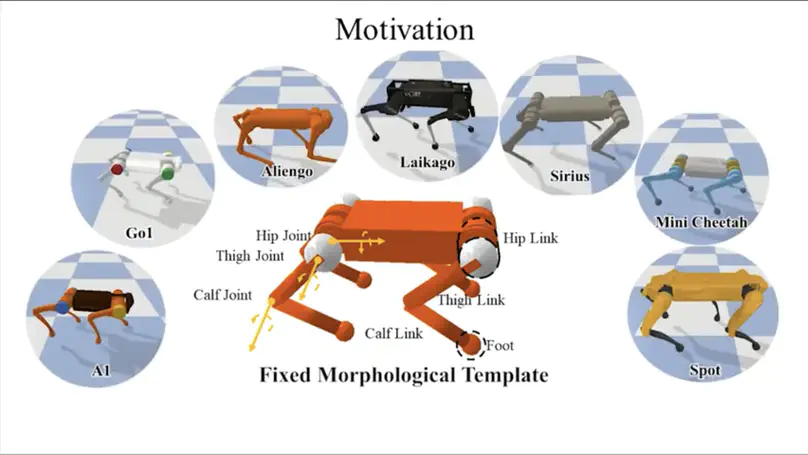
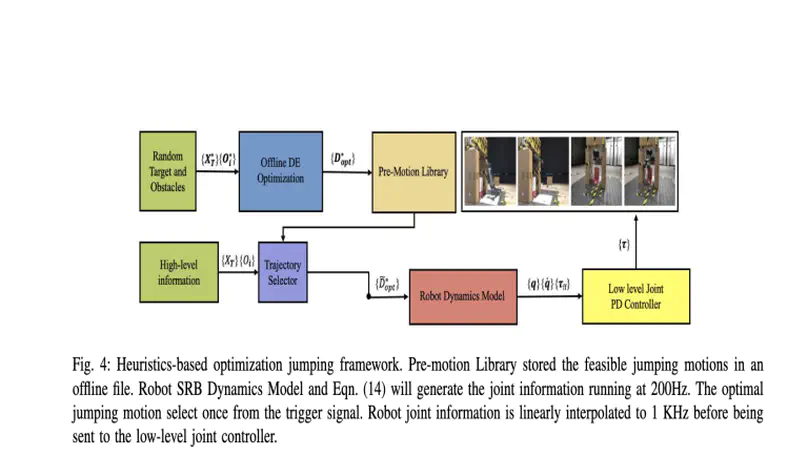
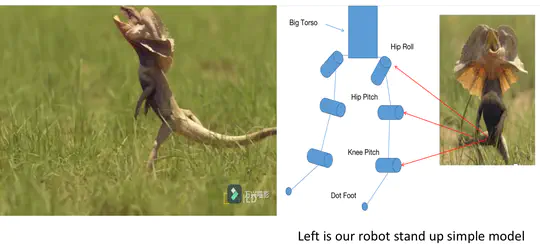
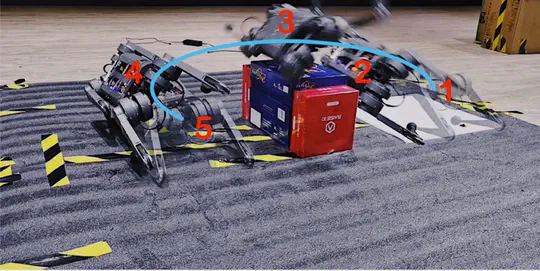
A research topic focus on using optimization approaches to give legged robot jumping ability.
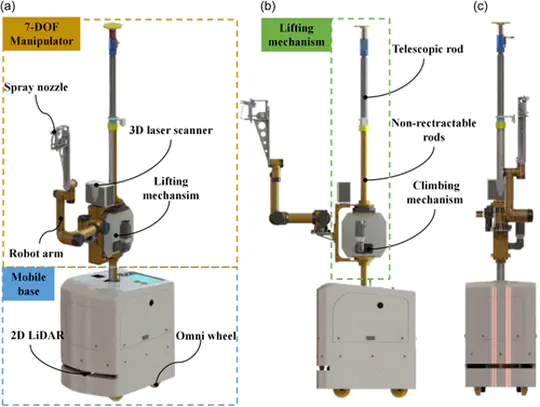
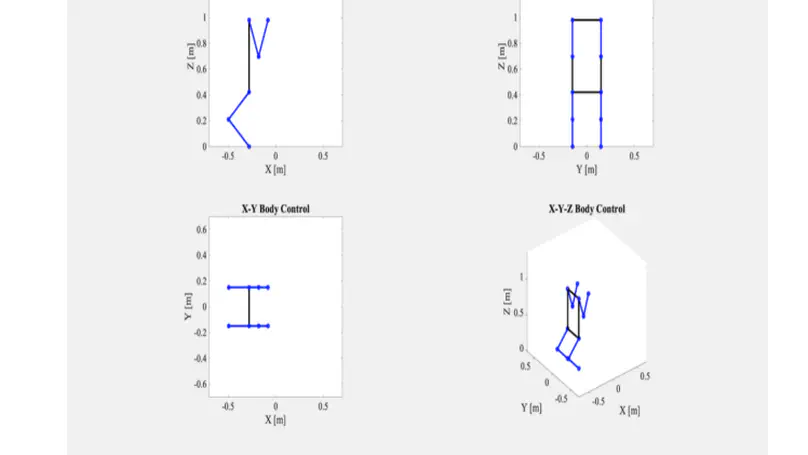
A research topic focus on using mobile-based and 6 Dof manipulator to paint the indoor environment.
Experience
Research Assistant of CUHK
CUHK
Responsibilities include:
- Developoing 12 DOF Indoor Painting Robot
- Control Framework Implementation
- Hardware Implementation
Software Engineer of DJI
Big data collection and analysis