I focus on research quadruped walking with two pint feet, recently.
Two legs dynamic walking control framework like lizards for quadruped robots.
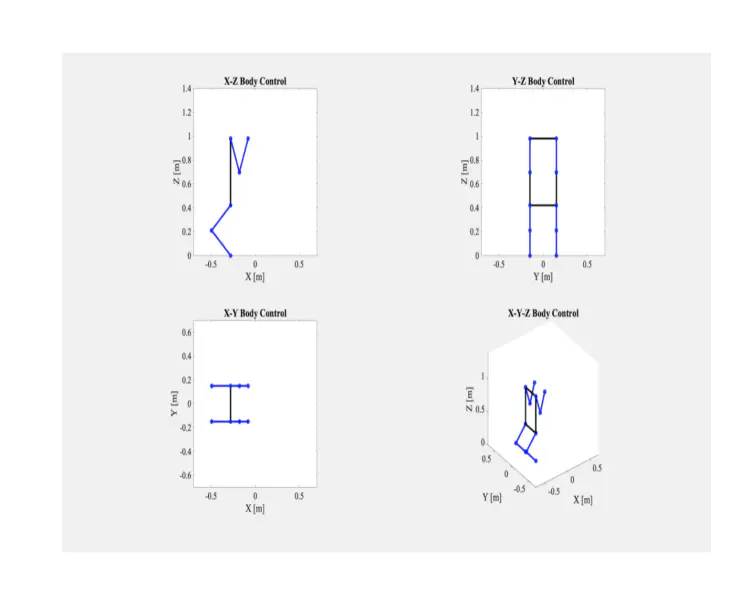 Image credit: linzhu
Image credit: linzhu
Overview
- Will be releasing soon.
Linzhu Yue
PhD Candidate
My research interests include quadruped robot, bipedal robot and Reinforcement Learning.